






Tarix:19/02/16
 ABŞ alimləri qurğu və mexanikası insan əlinin dəqiq surəti olmaqla məsafədən idarə edilən robotlaşdırılmış manipulyator icad ediblər. Texnologiya ilə bağlı hesabat Elektrotexnika və Elektronika İnstitutunun (IEEE) mayın 16-21-də Stokholmda keçiriləcək Beynəlxalq robot texnikası və avtomatika üzrə konfransa (ICRA 2016) təqdim edilmək üçün hazırlanıb.
ABŞ alimləri qurğu və mexanikası insan əlinin dəqiq surəti olmaqla məsafədən idarə edilən robotlaşdırılmış manipulyator icad ediblər. Texnologiya ilə bağlı hesabat Elektrotexnika və Elektronika İnstitutunun (IEEE) mayın 16-21-də Stokholmda keçiriləcək Beynəlxalq robot texnikası və avtomatika üzrə konfransa (ICRA 2016) təqdim edilmək üçün hazırlanıb.
“ICTnews” Elektron Xəbər Xidməti “Interfax” resursuna istinadən yazır ki, Sietl Vaşinqton Universitetinin tədqiqatçıları bildiriblər ki, müasir biomimetik antropomorf protezlərdə çoxlu kompromis texniki həllər (oynaqların ilmə, dartıcı, hiroskop və s.) olduğundan onlar funksionallığına görə real insan əlindən xeyli geri qalır. Bu səbəbdən onlar tədqiqat işində real əlin forma və mexanikasının dəqiq surətini çıxarmaq qərarına gəliblər.
Mütəxəssislər işə əlin skeletini lazerlə skan edərək “3D” printerdə sümüklərin dəqiq surətini çap etməklə başlayıblar. Bununla onlar, məsələn, barmağı geri çəkməyə və irəli gətirməyə imkan verən baş barmağın falanqası və əl darağının sümükləri arasında oynaqları əldə etməyə nail olublar.
Bənd və vətərlər yüksək molekulyar kütləyə malik polietilenin möhkəm tellərindən (Spectra) hazırlanıb. Əlin hərəkətində iştirak edən yumşaq toxumalar (çevikliyi məhdudlaşdıran və ya elastikliyi təmin edən) lazerlə rezindən kəsilməklə əvəz olunub. Ondan, həmçinin vətərlər üçün kanallar və açılan örtüklər hazırlanıb.
Mühəndislər əzələ yerinə polietilen tellərlə bazu önləri kimi vətərlərlə birləşmiş 10 "Dynamixel” servomühərrikdən istifadə ediblər. Hərəkətə nəzarət üçün barmaq uclarına əksedici markerlər bərkidilib ki, onların da koordinatları “VGA” təsvir ölçülü yeddi 240 herslik infraqırmızı "Vicon Bonita” müşahidə kamera sistemi ilə qeydə alınıb.
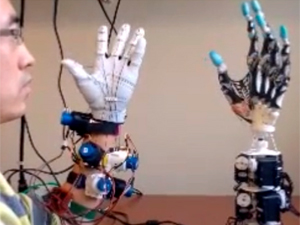
Ərsəyə gətirilən manipulyator operatorun əlinə taxılan ötürücülər sistemi ilə birləşdirilib. O, əl ilə dəqiq mexaniki oxşarlıq sayəsində insanın hərəkətlərini, həm güclü, həm də incə manipulyasiyalarda yüksək dəqiqliklə təkrar edib.
Tədqiqatçılar manipulyatorun məsafədən idarə olunan vəzifələri yerinə yetirməyə yararlı olması üçün onun konstruksiyasını təkmilləşdirmək niyyətindədirlər.
Nizam Nuriyev











ABŞ-da insan əlinin dəqiq mexaniki surəti yaradılıb
ABŞ alimləri qurğu və mexanikası insan əlinin dəqiq surəti olmaqla məsafədən idarə edilən robotlaşdırılmış manipulyator icad ediblər. Texnologiya ilə bağlı hesabat Elektrotexnika və Elektronika İnstitutunun (IEEE) mayın 16-21-də Stokholmda keçiriləcək Beynəlxalq robot texnikası və avtomatika üzrə konfransa (ICRA 2016) təqdim edilmək üçün hazırlanıb.“ICTnews” Elektron Xəbər Xidməti “Interfax” resursuna istinadən yazır ki, Sietl Vaşinqton Universitetinin tədqiqatçıları bildiriblər ki, müasir biomimetik antropomorf protezlərdə çoxlu kompromis texniki həllər (oynaqların ilmə, dartıcı, hiroskop və s.) olduğundan onlar funksionallığına görə real insan əlindən xeyli geri qalır. Bu səbəbdən onlar tədqiqat işində real əlin forma və mexanikasının dəqiq surətini çıxarmaq qərarına gəliblər.
Mütəxəssislər işə əlin skeletini lazerlə skan edərək “3D” printerdə sümüklərin dəqiq surətini çap etməklə başlayıblar. Bununla onlar, məsələn, barmağı geri çəkməyə və irəli gətirməyə imkan verən baş barmağın falanqası və əl darağının sümükləri arasında oynaqları əldə etməyə nail olublar.
Bənd və vətərlər yüksək molekulyar kütləyə malik polietilenin möhkəm tellərindən (Spectra) hazırlanıb. Əlin hərəkətində iştirak edən yumşaq toxumalar (çevikliyi məhdudlaşdıran və ya elastikliyi təmin edən) lazerlə rezindən kəsilməklə əvəz olunub. Ondan, həmçinin vətərlər üçün kanallar və açılan örtüklər hazırlanıb.
Mühəndislər əzələ yerinə polietilen tellərlə bazu önləri kimi vətərlərlə birləşmiş 10 "Dynamixel” servomühərrikdən istifadə ediblər. Hərəkətə nəzarət üçün barmaq uclarına əksedici markerlər bərkidilib ki, onların da koordinatları “VGA” təsvir ölçülü yeddi 240 herslik infraqırmızı "Vicon Bonita” müşahidə kamera sistemi ilə qeydə alınıb.
Ərsəyə gətirilən manipulyator operatorun əlinə taxılan ötürücülər sistemi ilə birləşdirilib. O, əl ilə dəqiq mexaniki oxşarlıq sayəsində insanın hərəkətlərini, həm güclü, həm də incə manipulyasiyalarda yüksək dəqiqliklə təkrar edib.
Tədqiqatçılar manipulyatorun məsafədən idarə olunan vəzifələri yerinə yetirməyə yararlı olması üçün onun konstruksiyasını təkmilləşdirmək niyyətindədirlər.
Nizam Nuriyev
Baxış sayı: 628
© İstifadə edilərkən İctnews-a istinad olunmalıdır
Oxşar xəbərlər
- Şifrənin əvəzinə gözün quzehli qişası
- Ucqar dağ kəndlərində hər bir ev üçün ADSL
- Yardımlı rabitəsi də TAE xəttinə qoşulacaq
- Səhiyyə Nazirliyindən online nəzarət sistemi
- “B&B TV Naxçıvanda da fəaliyyət göstərəcək
- Ölkəmizdə "nağdsız cəmiyyət” qurulur
- Xınalıqda sürətli internet
- “Xalq kompyuteri” layihəsi kəndlərdə
- Ölkəmizin nəhəng elektron xəritəsi hazırlanacaq
- “AzEuroTel” MMC oldu
- Ədliyyə Nazirliyi elektron xidmətlər köşkü
- Elektron xidmətlərlə bağlı xüsusi bölmə yaradılacaq
- “Nokia” əməkdaşlarını iPhone-dan istifadə etməyə çağırıb
- Aviabiletlərin elektron qeydiyyatı
- AZAL-dan elektron kartla pulsuz bilet







