






Date:06/11/18
 Chinese engineers have created an algorithm that allows the drone and the ground robot to jointly create an environmental map and avoid obstacles in it. Experiments have shown that this method allows you to explore the environment faster than the same devices do it one by one.
Chinese engineers have created an algorithm that allows the drone and the ground robot to jointly create an environmental map and avoid obstacles in it. Experiments have shown that this method allows you to explore the environment faster than the same devices do it one by one.
As a rule, when developing robots, engineers choose their design based on the task that this device will perform. For example, ground robots can carry a fairly massive load or a multitude of sensors and tools for interacting with the environment. Unmanned aerial vehicles, such as multikopter, also have their advantages, including, they are able to move faster and explore more extensive territory.
Engineers under the leadership of Shaojie Shen from the Hong Kong University of Science and Technology decided to combine devices of different types into a single system that works more efficiently than the same devices alone. Unlike other engineers, Shen and colleagues decided to use the drone as a complete, not a backup data source.
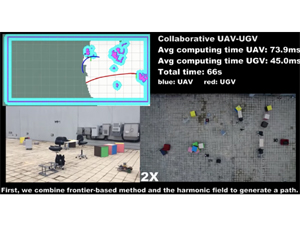
The developers have created an algorithm that constantly builds a map of the area and puts objects on it. At the same time, a boundary is formed between the investigated and unexplored areas. The path planner for robots is designed in such a way that it constantly updates the trajectory and sends the robot to the longest section of the border, thus encouraging research into the largest unexplored areas.
Engineers independently created a four-wheeled robot with a lidar and a quadrocopter with a downward-looking stereo camera to create a map of the area. During the movement, the robot and the drone in real time create a single map of the area with obstacles placed on it. Due to this, each of them cannot waste time exploring the area, if the data about it has already been collected by another device.
Engineers conducted two types of experiments – in a real room measuring 17 by 8 meters, and also in a virtual space measuring 20 by 20 meters. During the experiments, the devices worked together or alone. The results of the experiments showed that in all types of environments (virtual and real) the cooperation of two types of devices allows them to make a complete map of the premises faster than with independent work.
Recently, a group of engineers from the United States and Switzerland created a pair of small drones, which, thanks to joint work, learned how to perform quite complex tasks. In one of the experiments demonstrated, the drones were able to independently open a large door with a pushed handle.











Robot and drone learn how to explore the world together
Chinese engineers have created an algorithm that allows the drone and the ground robot to jointly create an environmental map and avoid obstacles in it. Experiments have shown that this method allows you to explore the environment faster than the same devices do it one by one.As a rule, when developing robots, engineers choose their design based on the task that this device will perform. For example, ground robots can carry a fairly massive load or a multitude of sensors and tools for interacting with the environment. Unmanned aerial vehicles, such as multikopter, also have their advantages, including, they are able to move faster and explore more extensive territory.
Engineers under the leadership of Shaojie Shen from the Hong Kong University of Science and Technology decided to combine devices of different types into a single system that works more efficiently than the same devices alone. Unlike other engineers, Shen and colleagues decided to use the drone as a complete, not a backup data source.
The developers have created an algorithm that constantly builds a map of the area and puts objects on it. At the same time, a boundary is formed between the investigated and unexplored areas. The path planner for robots is designed in such a way that it constantly updates the trajectory and sends the robot to the longest section of the border, thus encouraging research into the largest unexplored areas.
Engineers independently created a four-wheeled robot with a lidar and a quadrocopter with a downward-looking stereo camera to create a map of the area. During the movement, the robot and the drone in real time create a single map of the area with obstacles placed on it. Due to this, each of them cannot waste time exploring the area, if the data about it has already been collected by another device.
Engineers conducted two types of experiments – in a real room measuring 17 by 8 meters, and also in a virtual space measuring 20 by 20 meters. During the experiments, the devices worked together or alone. The results of the experiments showed that in all types of environments (virtual and real) the cooperation of two types of devices allows them to make a complete map of the premises faster than with independent work.
Recently, a group of engineers from the United States and Switzerland created a pair of small drones, which, thanks to joint work, learned how to perform quite complex tasks. In one of the experiments demonstrated, the drones were able to independently open a large door with a pushed handle.
Views: 448
©ictnews.az. All rights reserved.
Similar news
- Azerbaijani project to monitor disease via mobile phones
- Innovative educational system to be improved under presidential decree
- NTRC prolongs license of two TV and radio organizations for 6 years
- Azerbaijan establishes e-registry for medicines
- Azerbaijani museum introduces e-guide
- Nar Mobile opens “Nar Dunyasi” sales and service center in Siyazan city
- International conference on custom electronic services held in Baku
- OIC secretary general to attend COMSTECH meeting in Baku
- Azerbaijan develops earthquake warning system
- New law to regulate transition to digital broadcasting in Azerbaijan
- Azerbaijani State Social Protection Fund introduces electronic digital signature
- Intellectual traffic management system in Baku to be commissioned in December
- Tax Ministry of Azerbaijan started receiving video-addresses
- World Bank recommends Azerbaijan to speed up e-service introduction in real estate
- Azerbaijan to shift to electronic registration of real estate







